定时自动正反转控制电路是一种广泛应用于工业自动化、电机控制、机器人等领域的电路系统。它能够按照预设的时间间隔,自动控制执行部件(如直流电机)进行正转、停止、反转的周期性动作。以下是该电路的设计原理、关键组成部分以及集成电路实现方案。
一、电路设计原理
定时自动正反转控制电路的核心在于时序控制逻辑和电机驱动模块的结合。电路通过定时器产生周期性信号,控制H桥驱动电路切换电机电流方向,从而实现电机的正转和反转。
二、关键组成部分
- 定时器模块:
- 常用集成电路:NE555定时器或CD4060分频器。
- 功能:产生固定周期的方法脉冲,控制正反转切换时间。
- 逻辑控制模块:
- 常用集成电路:CD4017十进制计数器或CD4013双D触发器。
- 功能:根据定时器输出,切换正转、停止、反转三种状态。
- 电机驱动模块:
- 常用集成电路:L298N双H桥驱动芯片或L293D电机驱动IC。
- 功能:接收逻辑信号,控制电机电源极性,实现正反转。
- 保护电路:
- 包括过流保护、续流二极管等,确保电路安全运行。
三、集成电路设计方案示例
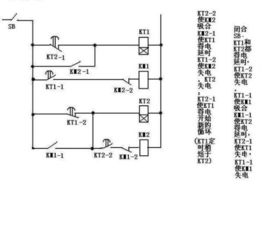
以下是基于NE555和CD4017的定时自动正反转控制电路设计图思路:
- NE555构成多谐振荡器,输出方波至CD4017的时钟输入端。
- CD4017的输出端Q0、Q1、Q2分别代表“正转”、“停止”、“反转”状态,通过逻辑门或直接连接至L298N的输入控制端。
- L298N的OUT1、OUT2连接电机两端,通过改变IN1、IN2的电平组合控制电机转向。
四、设计注意事项
- 定时器频率应根据实际需求调整RC元件值。
- 电机驱动芯片需匹配电机电压和电流,必要时加散热片。
- 逻辑电平需兼容,例如CD4017输出5V,而L298N支持5V逻辑输入。
- 加入硬件互锁,防止H桥上下管直通导致短路。
五、应用与扩展
该电路可通过微控制器(如Arduino、STM32)升级,实现更复杂的时间控制和智能反馈。集成电路设计不仅简化了电路结构,还提高了系统的可靠性和灵活性。
如需具体设计图纸,建议参考电子设计平台(如Electronics Lab、Circuit Digest)或集成电路数据手册,结合实际参数进行仿真和调试。